Portfolio
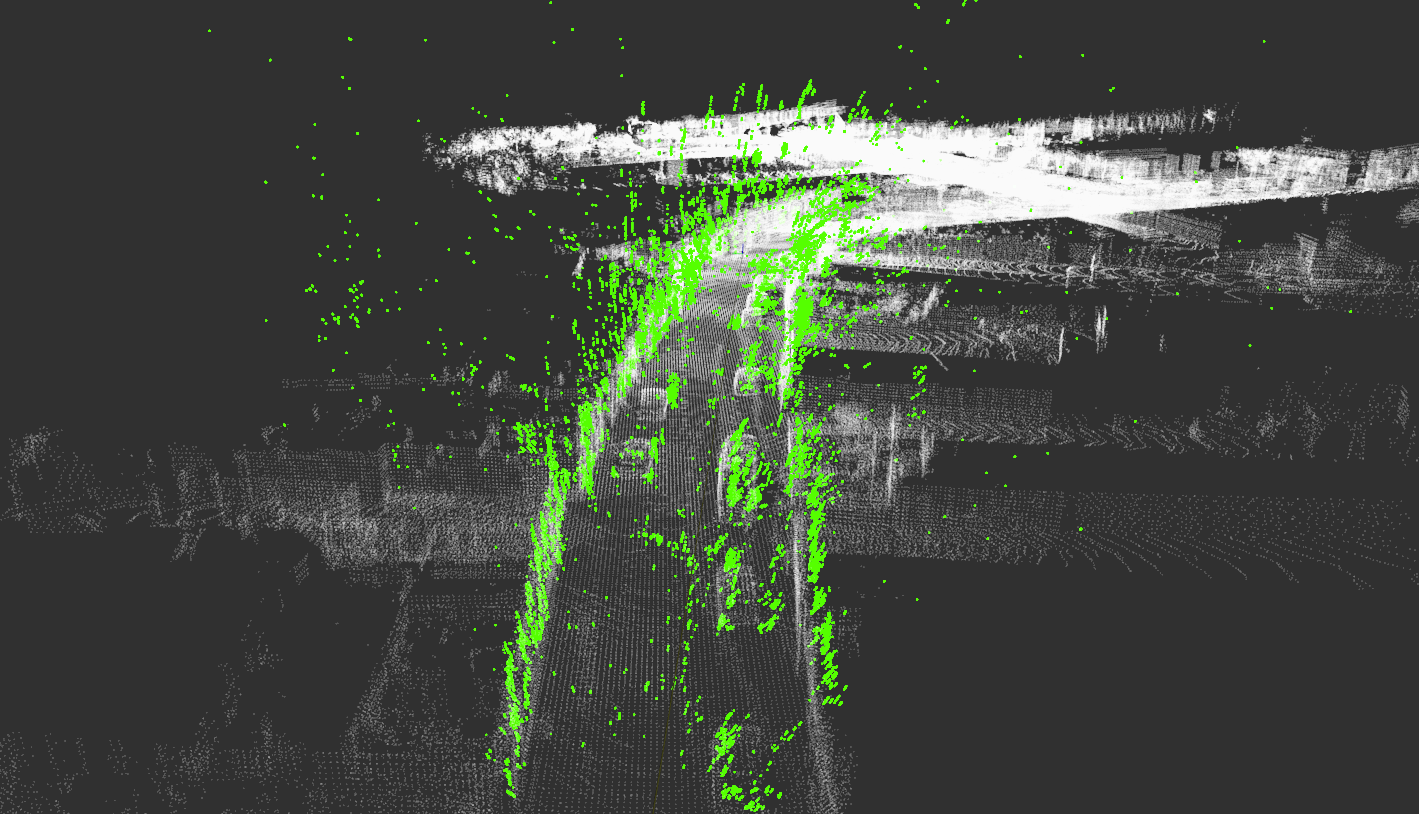
Monocular 3D localization using 3D LiDAR Maps
Monocular 3D localization using 3D LiDAR Maps
Master thesis project: using ROS, PCL, OpenCV, Visual Odoemtry, g2o, OpenMP
・Matching visual odometry results and 3D LiDAR map
・Graph based optimiation will improve localization results
・Run about 60ms per frame
Commint Soon ...
VoxelNet implementation from scratch
Voxelnet implementation in Chainer, ROS
Original paper is "VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection
"
・Hash based efficient input creater is implemented
・Visualizer using ROS is implemented
・Multi-gpu training, lr scheduler are implemented
Improved beyond pixel tracker in C++
Improved beyond pixel tracker in C++, OpenCV
Original paper is "Beyond Pixels: Leveraging Geometry and Shape Cues for Online Multi-Object Tracking"
・3D-3D/3D-2D IOU matching algorithm is implemented
・Run about 2ms per frame
・The code will be integrated into Autoware
Autoware -Opensource Committer-
Autoware -Opensource Committer-
Autoware is a open source software for autonomous driving systems
・developed 3D object tracking system using beyond pixel tracker
・developed Rosbag data extractor using ROS, OpenCV, PCL
・developing 3D object detection system using VoxelNet
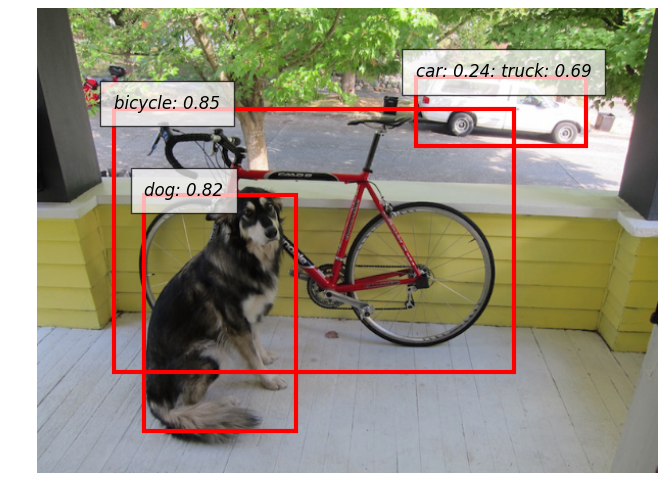
Yolov2 implementation from scratch
Yolov2 implementation in Chainer, ChainerCV, Python3
Original paper is "YOLO9000: Better, Faster, Stronger"
・Reproduce the results of the original paper
・Faster than original implementation in darknet
・Multi-gpu/scale training, lr scheduler are implemented

SfMLearner implementation from scrach
SfMLearner implementation in Chainer, Python3
Original paper is "Unsupervised Learning of Depth and Ego-Motion from Video"
・Reproduce the results of the original paper
・Evaluate depth and odometry results by KiTTI Dataset
・Multi-gpu training, lr scheduler are implemented

ENet implementation in Chainer
ENet implementation in Chainer, ChainerCV, Python3
Original paper is "ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation"
・Reproduce the results of the original paper
・Evaluate segmentation results by Cityscapes Dataset
・Class weighting and spatial dropout are implemented
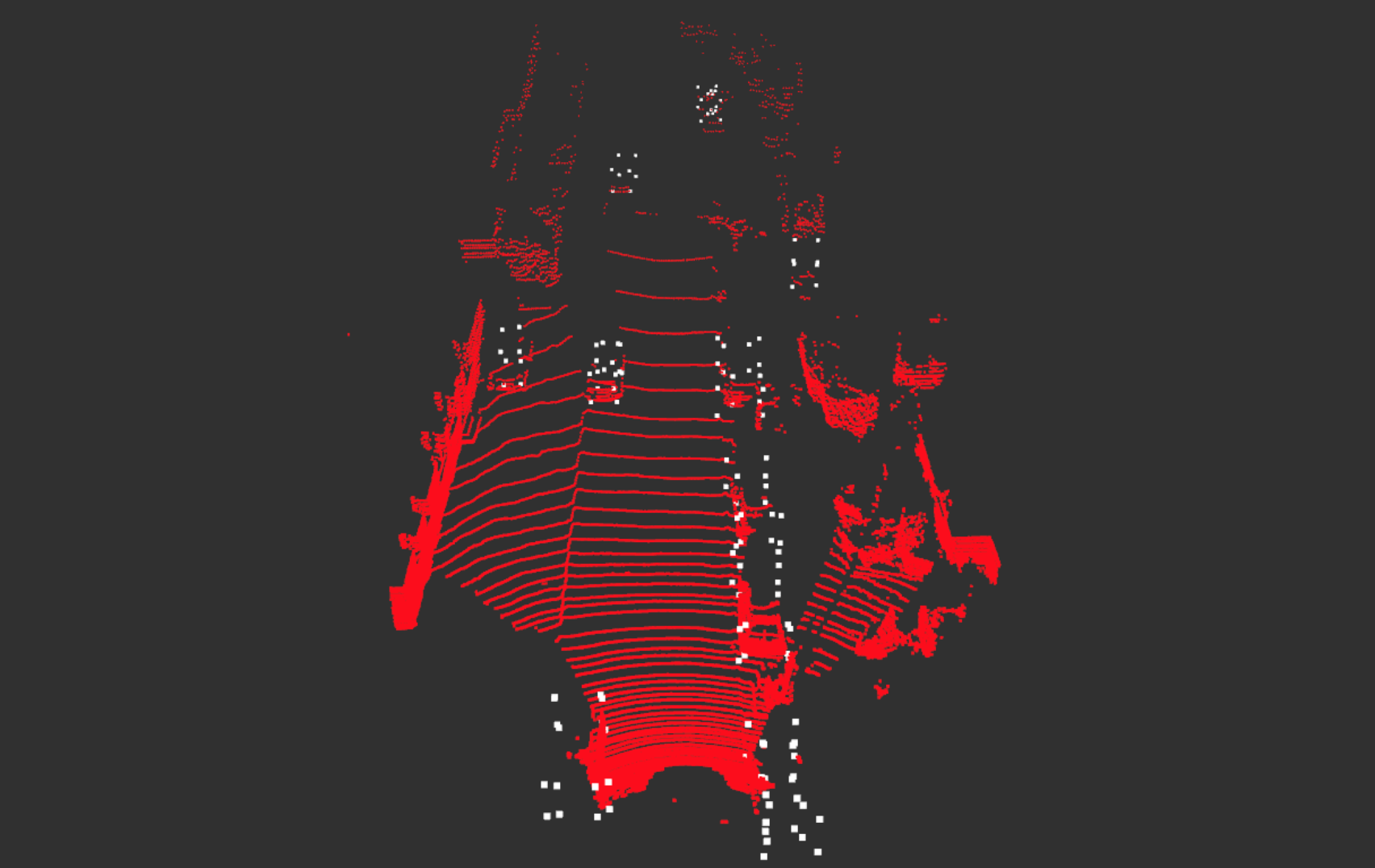
3D FCN for Vehicle Detection in TensorFlow
3D FCN for Vehicle Detection in Point Cloud by Tensorflow, ROS, Python
Original paper is "3D Fully Convolutional Network for Vehicle Detection in Point Cloud"
・LIDAR based 3D convolutional network
・Visualizer using ROS is implemented
・Dirty code...
Experience
Preferred Networks, Inc.
Summer Internship and Part-Time EngineerDeveloping deep-learning based algorithms for computer vision
Aug 2017 - Present
Tier Ⅳ, Inc.
Part-Time Software EngineerDeveloping multi-object tracking, SLAM and localization systems for autonomous driving systems
Apr 2017 - Present
Grid, Inc.
Part-Time EngineerDeveloped a deep learning framework 'ReNom', especially for the utilities of computer vision.
Jan 2017 - May 2017
Samurai Incubate, Inc.
Business DeveloperHad an rich experience as a project manager of many hackathon events
Feb 2014 - May 2016
Education
Tokyo University
Master of Information Science and Technology in Computer Science
3D object detection for autonomous driving
Kato laboratory [link]
Apr 2017 - Mar 2019
Keio University
Bachelor of Engineering in Administration Engineering
Ontology(Knowledge based approach) for communication robot
Yamaguchi laboratory [link]
Apr 2012 - Mar 2016
Publication
One paper accepted to IEEE ITSC2018
Y. Tsuji, H. Chishiro and S. Kato, "Non-Guided Depth Completion with Adversarial Networks"